Third class
Date: 24/01/2023
I arrived earlier than usual to begin printing my parts immediately in order to evaluate the feasibility of the design conceptualized the previous day.
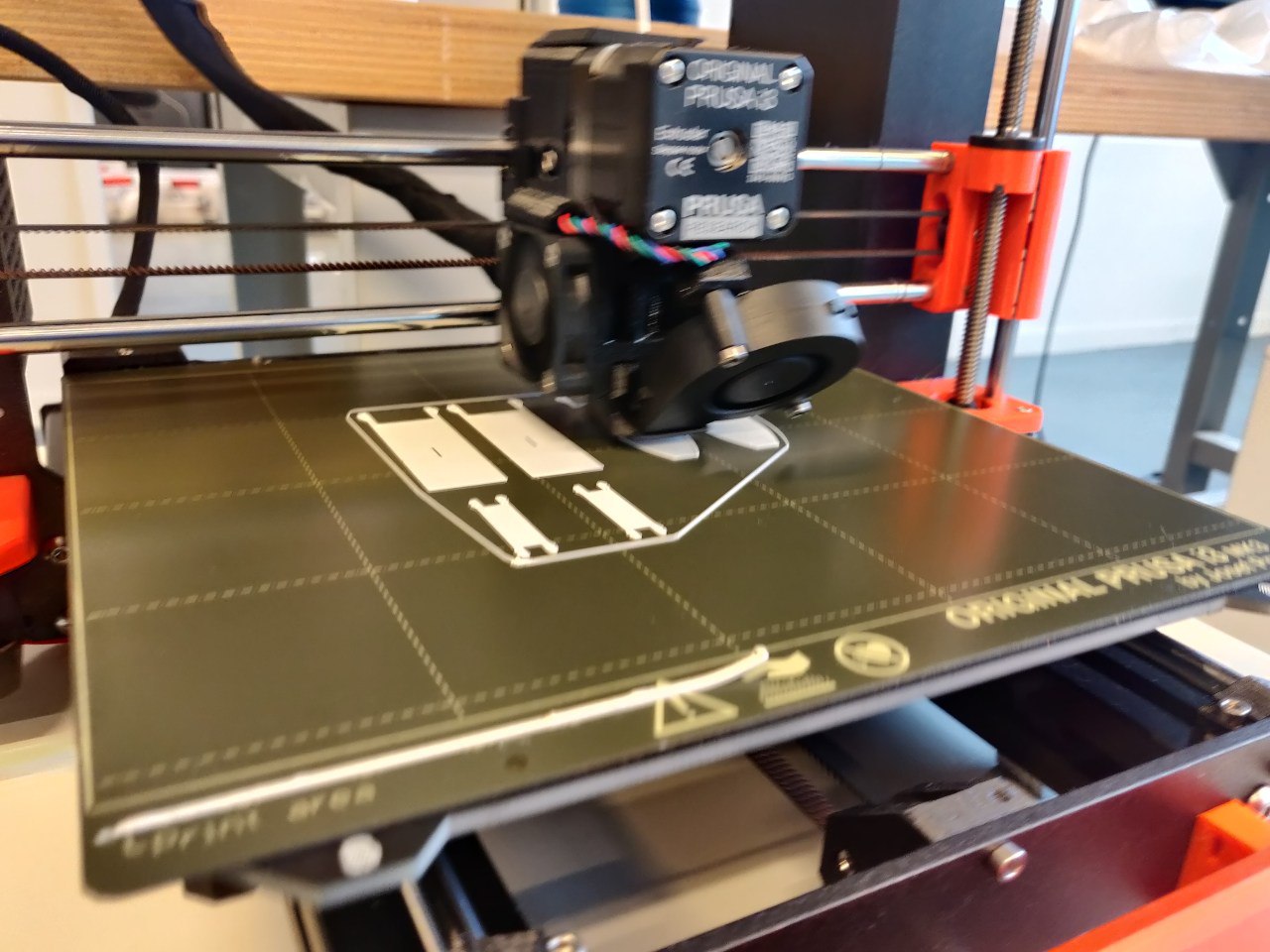
However, in an effort to expedite the process, I set the thickness to 0.2mm, which proved to be too precise for the printer to handle.
As a result, the overall outcome was unsuccessful, as the interlocking mechanism was insufficiently robust to support the main body and legs.
In light of this, I decided to test an alternative joint, but it appeared to be too similar to one utilized by a colleague, Marco.
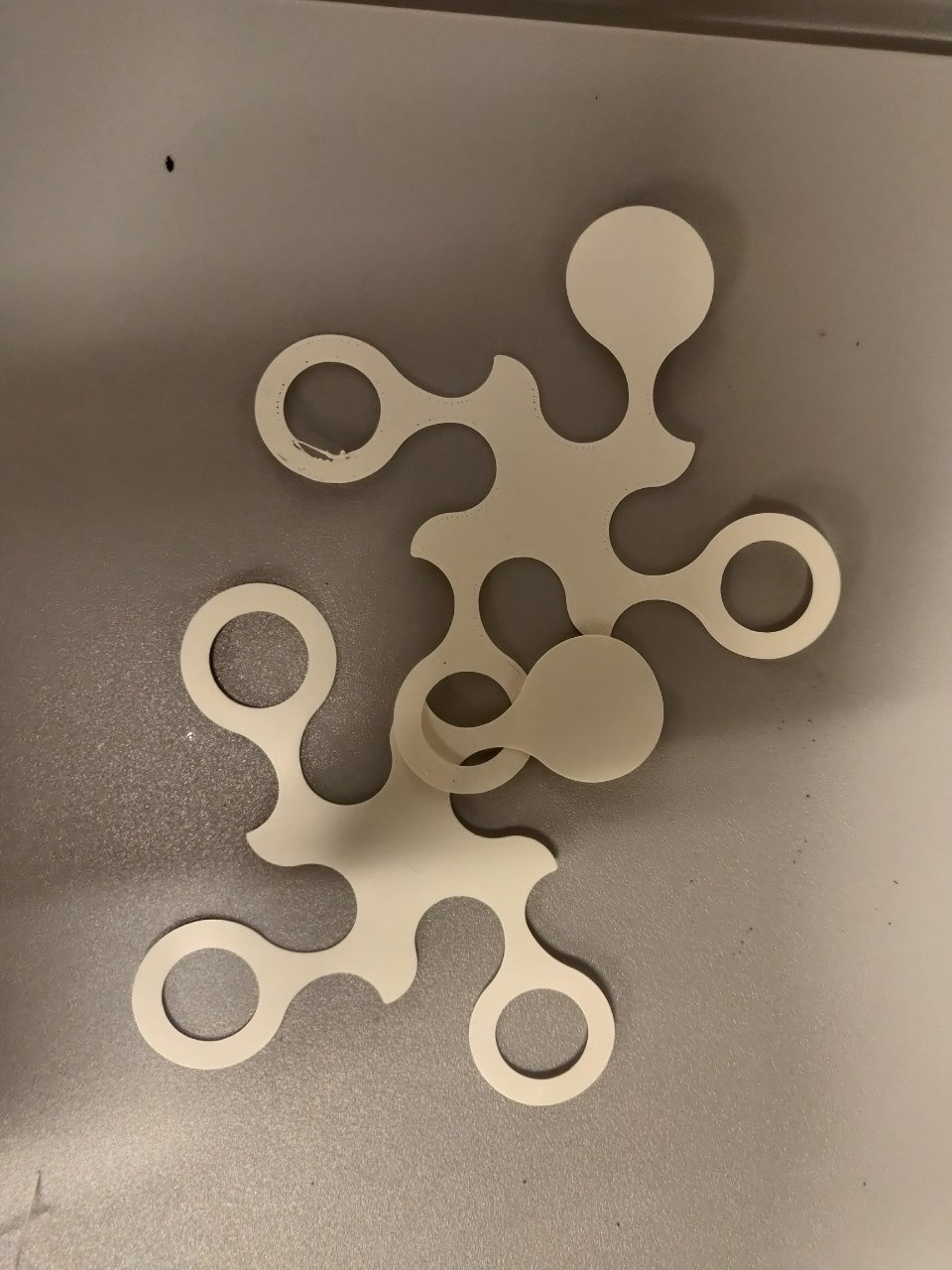
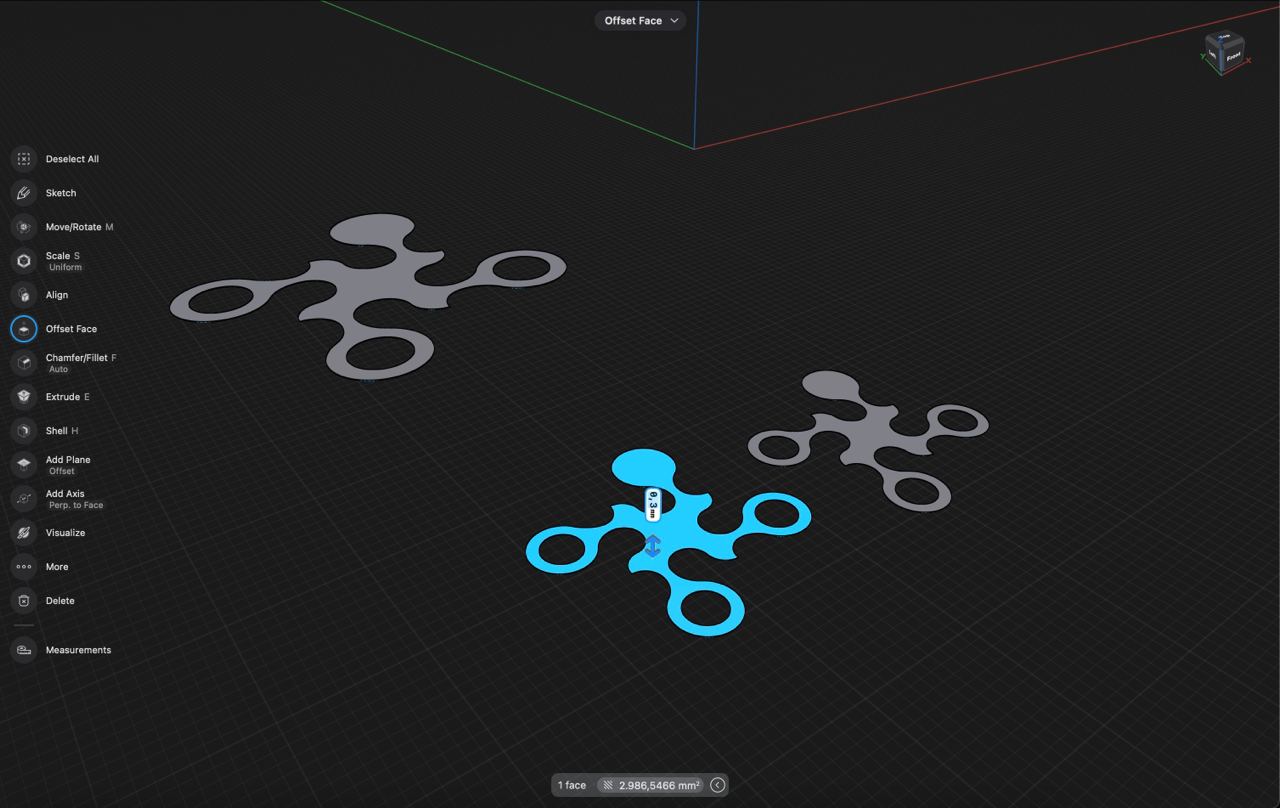
As a final attempt, I devised a circular joint utilizing the flexibility of PLA.
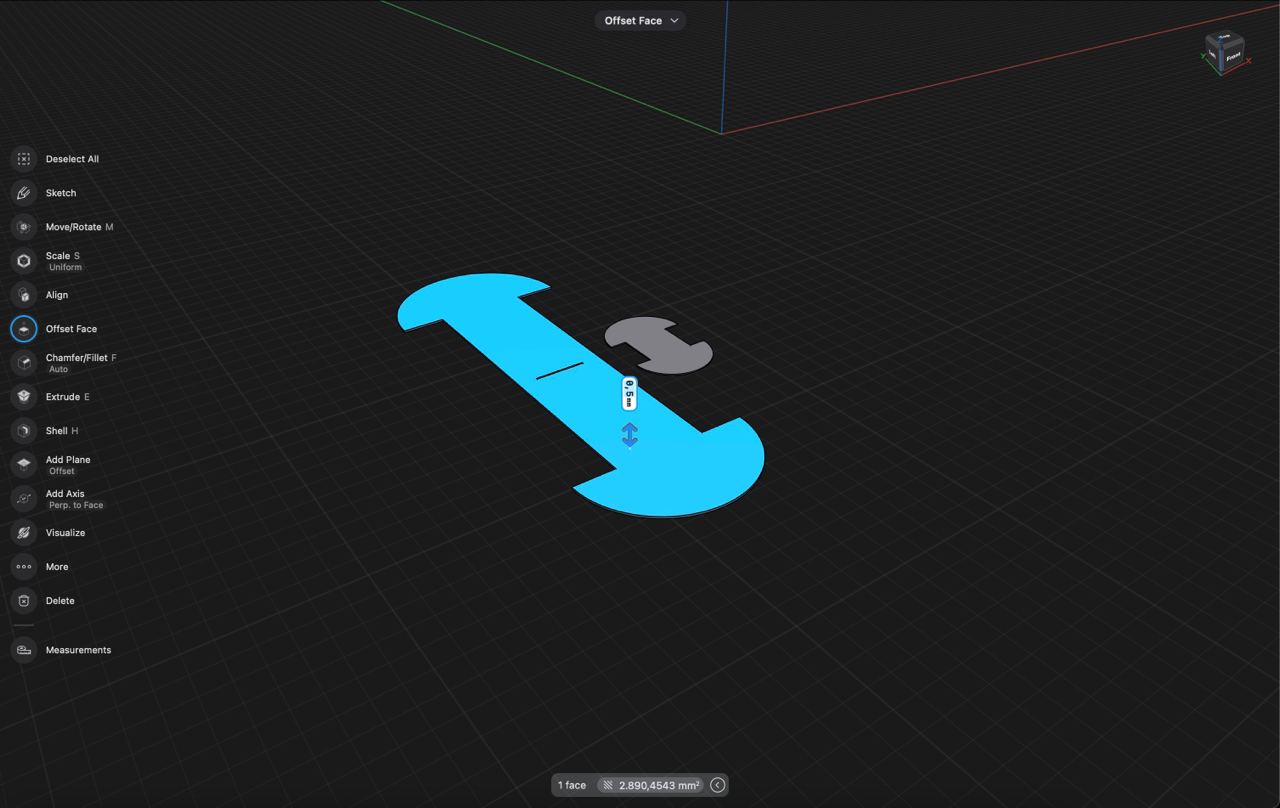
The new design consisted of a symmetric curved structure with four circular arms: two solid and two hollow.
The solid arms were implemented to provide additional strength and support the weight of other components when assembled.
The final outcome was successful, with the exception of a minor imperfection on one of the printed objects. The two objects fit together perfectly.